GPS Refinement and Camera Orientation Estimation from a Single Image and a 2D Map
Goal
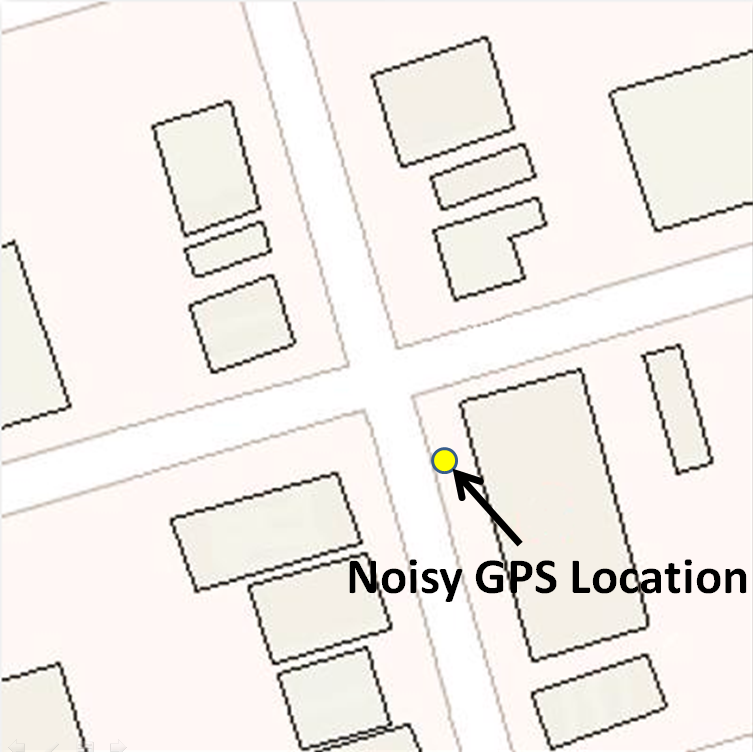
Improve GPS accuracy by a building photo and a 2D map in urban environments.
Example: GPS tells me a location, but with several meters inaccuracy. If I also have a photo and the map,
I know only at certain positions could I see a building looks like that, then I can probably find out where
am I more accurately.

Method
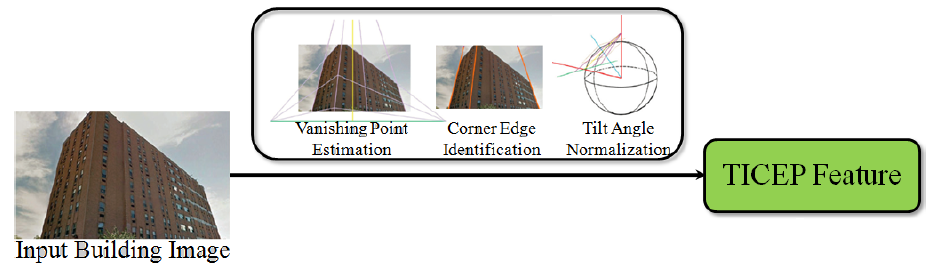
Step 1: Find vertical building edges in the photo, represent them in a tilt-invariant way: Tilt-Invariant Vertical Edge
Position (TICEP) features.
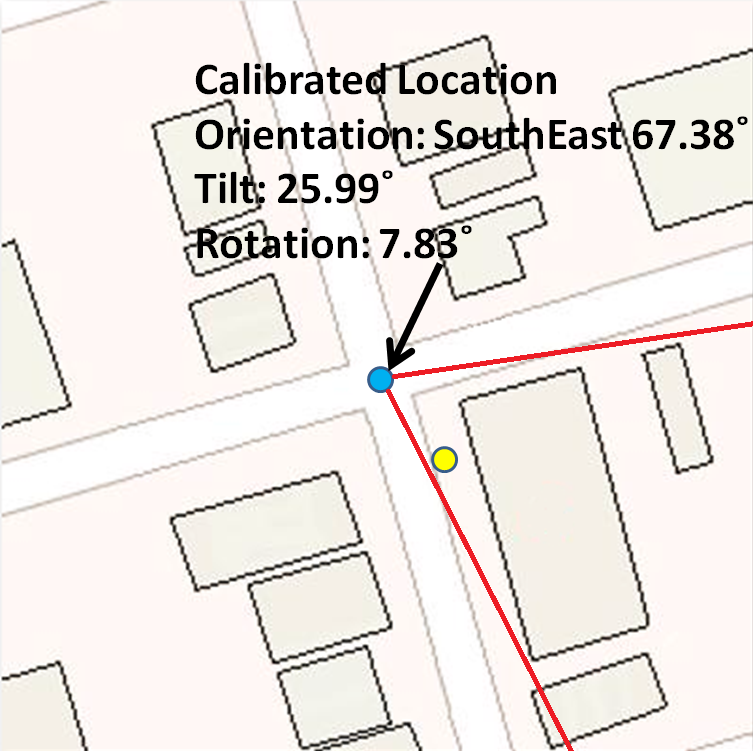
Example: all LOHs (blue), and the correct one (red):

Note: not guaranteed to 100% find better position than GPS, but generally speaking achieves better accuracy.
Example: The correct LOH (much more accurate than GPS as geometry doesn't lie!) can be selected as long as GPS falls into the red area (the refinable area).
